Research Directions
Each of our projects centers on one or more of three elements: the robot, the algorithm that drives the robot, or the human that interacts with the robot. You select an element below to sort our research accordingly.
Current
We make novel accessories for robots to easily perform dexterous manipulations like scooping cereal.

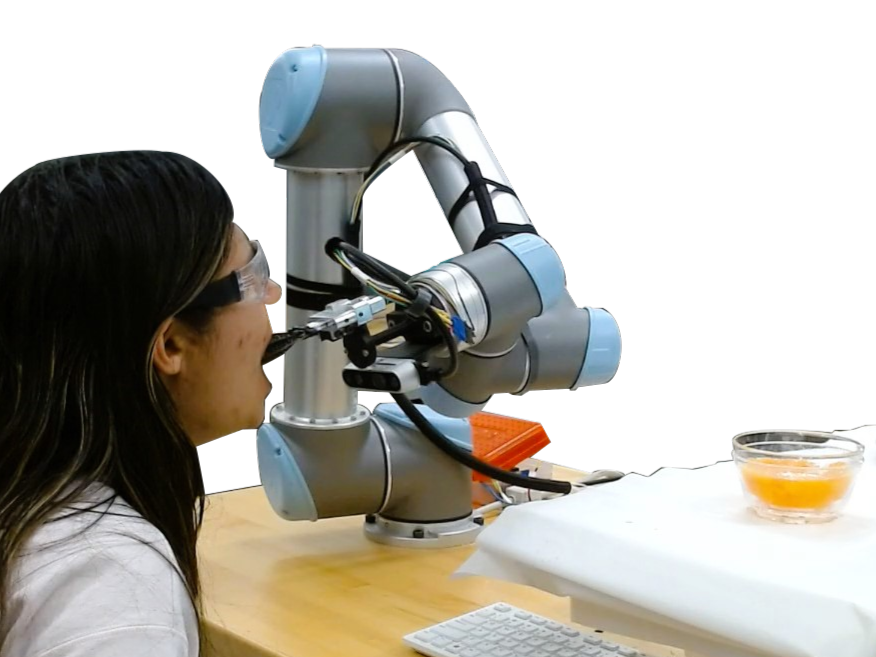
We develop intelligent robots that learn from humans and adapt to their preferences.

We design interactive and intuitive interfaces for users to control and communicate with robots.
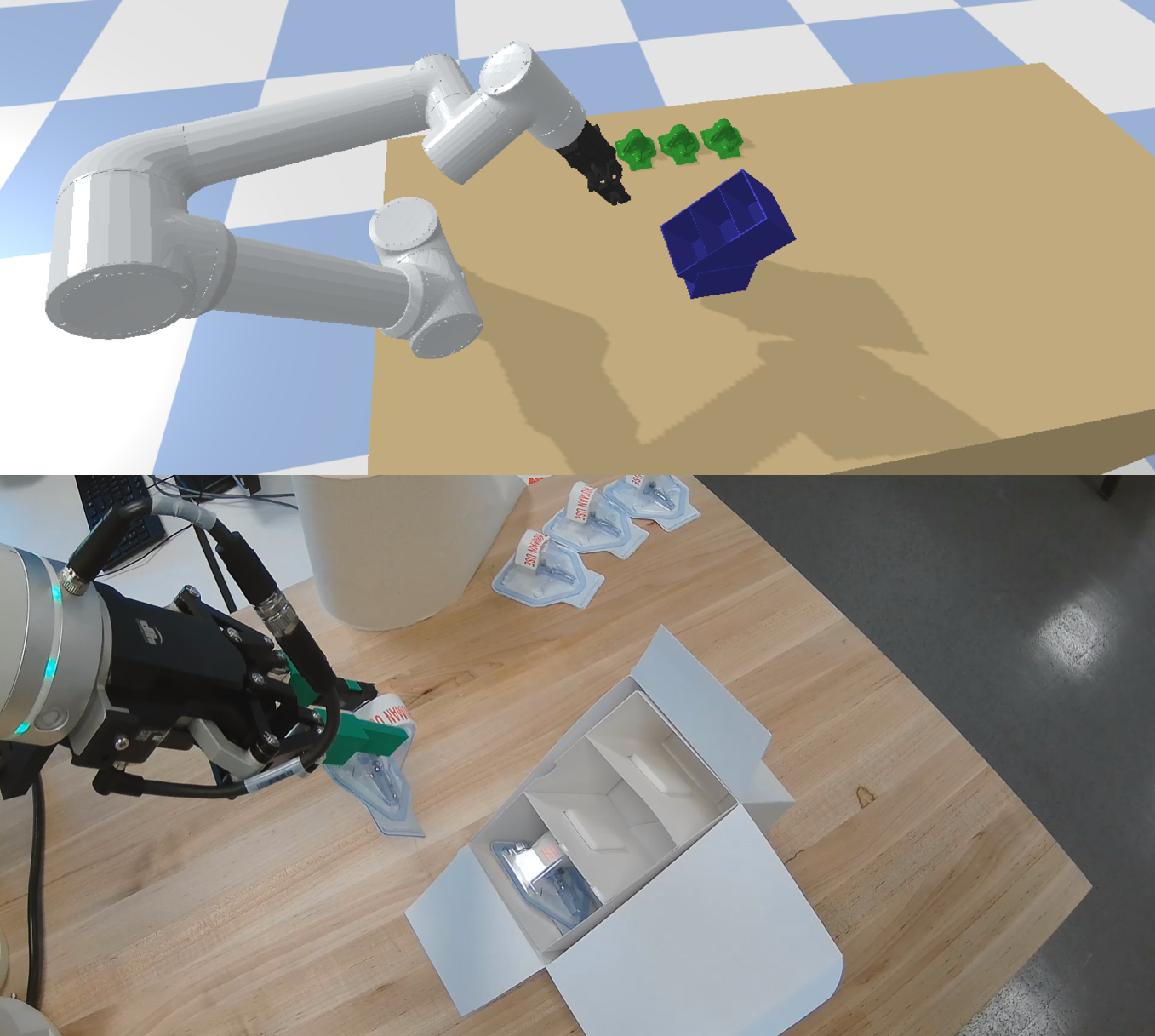
We deploy robotic systems for industrial operations including manufacturing and packaging.
Previous

We develop planning methods for robots to safely navigate cluttered environments.
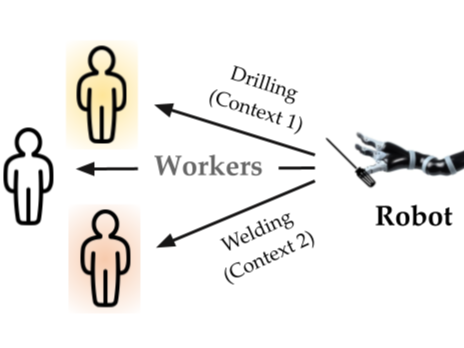
We develop frameworks for multi-robot and human-robot team coordination.