Research Directions
Each of our projects centers on one or more of three elements: the robot, the algorithm that drives the robot, or the human that interacts with the robot. You select an element below to sort our research accordingly.
Current
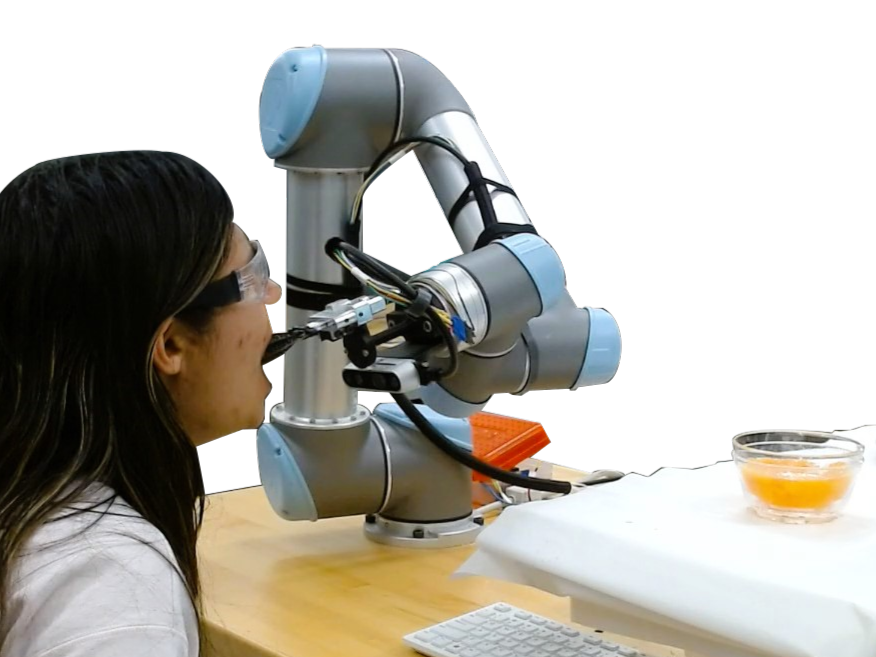
Mechanism Design
soft end-effectors, teleoperation devices
We make it easier for robots (and for humans who operate them) to perform dexterous tasks like scooping ice cream.

Robot Learning
imitation learning, vision-language-action models
We create intelligent robots that can learn everday tasks (e.g., making coffee) from human demonstrations.

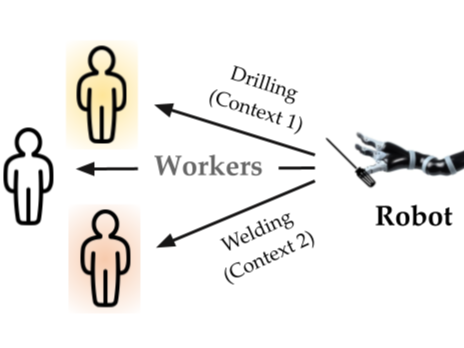
Human Interaction
graphic interfaces, latent representation
We develop interactive and intuitive user-interfaces for humans to understand robots and personalize their motion.
Previous