Publications
For a complete list of our publications please visit the PI’s google scholar page.
Highlighted
Selecting Source Tasks for Transfer Learning of Human Preferences
IEEE Robotics and Automation Letters
·
01 Aug 2024
·
doi:10.1109/LRA.2024.3415432
All
2025
Kiri-Spoon: A kirigami utensil for robot-assisted feeding
The International Journal of Robotics Research
·
24 Dec 2025
·
doi:10.1177/02783649251405291
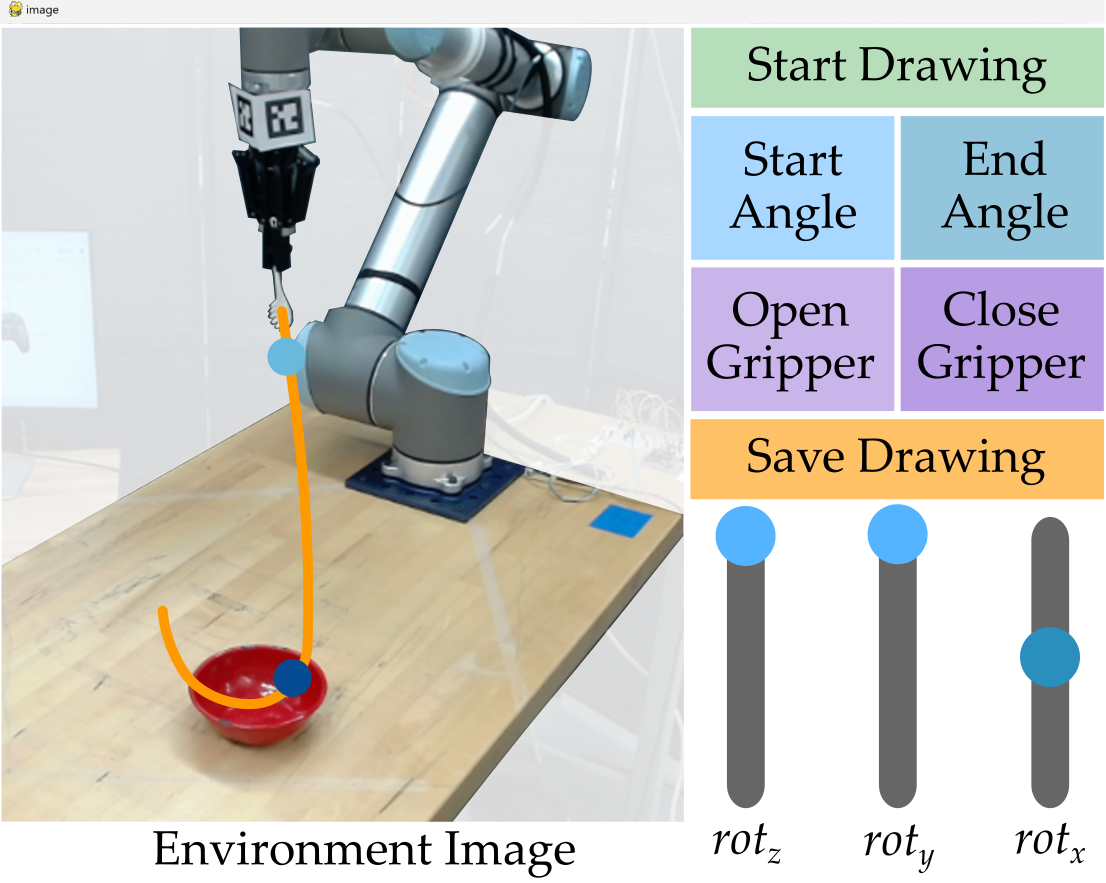
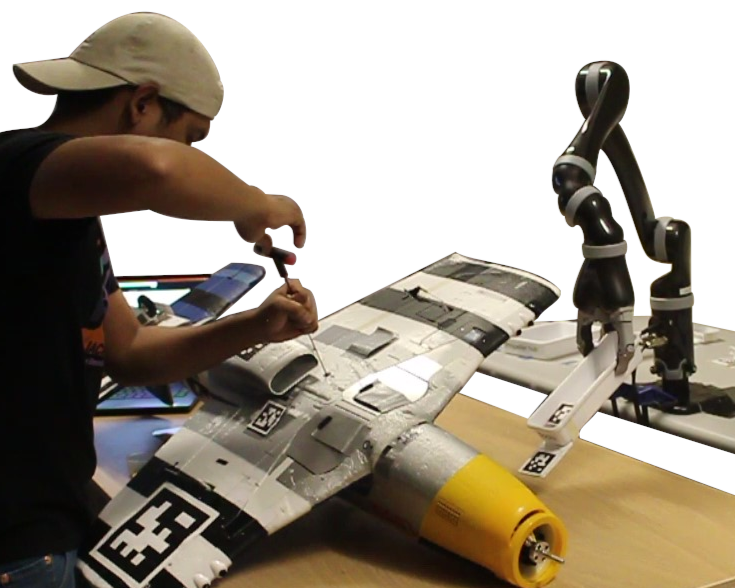
L2D2: Robot Learning from 2D drawings
Autonomous Robots
·
01 Sep 2025
·
doi:10.1007/s10514-025-10210-x

PECAN: Personalizing Robot Behaviors through a Learned Canonical Space
ACM Transactions on Human-Robot Interaction
·
20 Aug 2025
·
doi:10.1145/3737894

Personalizing Interfaces to Humans with User-Friendly Priors
2025 IEEE International Conference on Robotics and Automation (ICRA)
·
19 May 2025
·
doi:10.1109/icra55743.2025.11128246
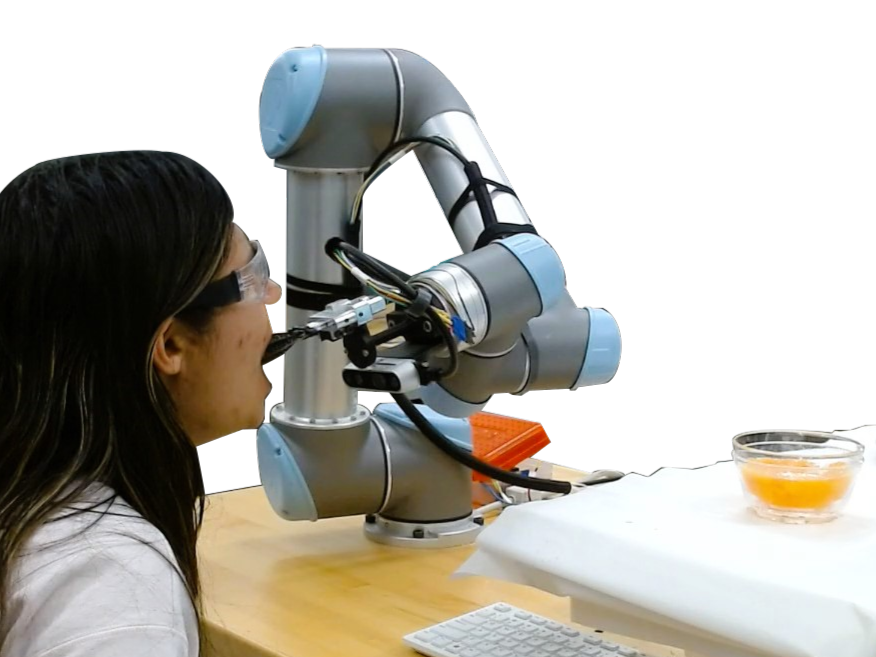
Kiri-Spoon: A Kirigami Utensil for Robot-Assisted Feeding
arXiv
·
01 Jan 2025
·
doi:10.48550/arXiv.2501.01323
CIVIL: Causal and Intuitive Visual Imitation Learning
arXiv
·
01 Jan 2025
·
doi:10.48550/arXiv.2504.17959

Towards Balanced Behavior Cloning from Imbalanced Datasets
arXiv
·
01 Jan 2025
·
doi:10.48550/arXiv.2508.06319
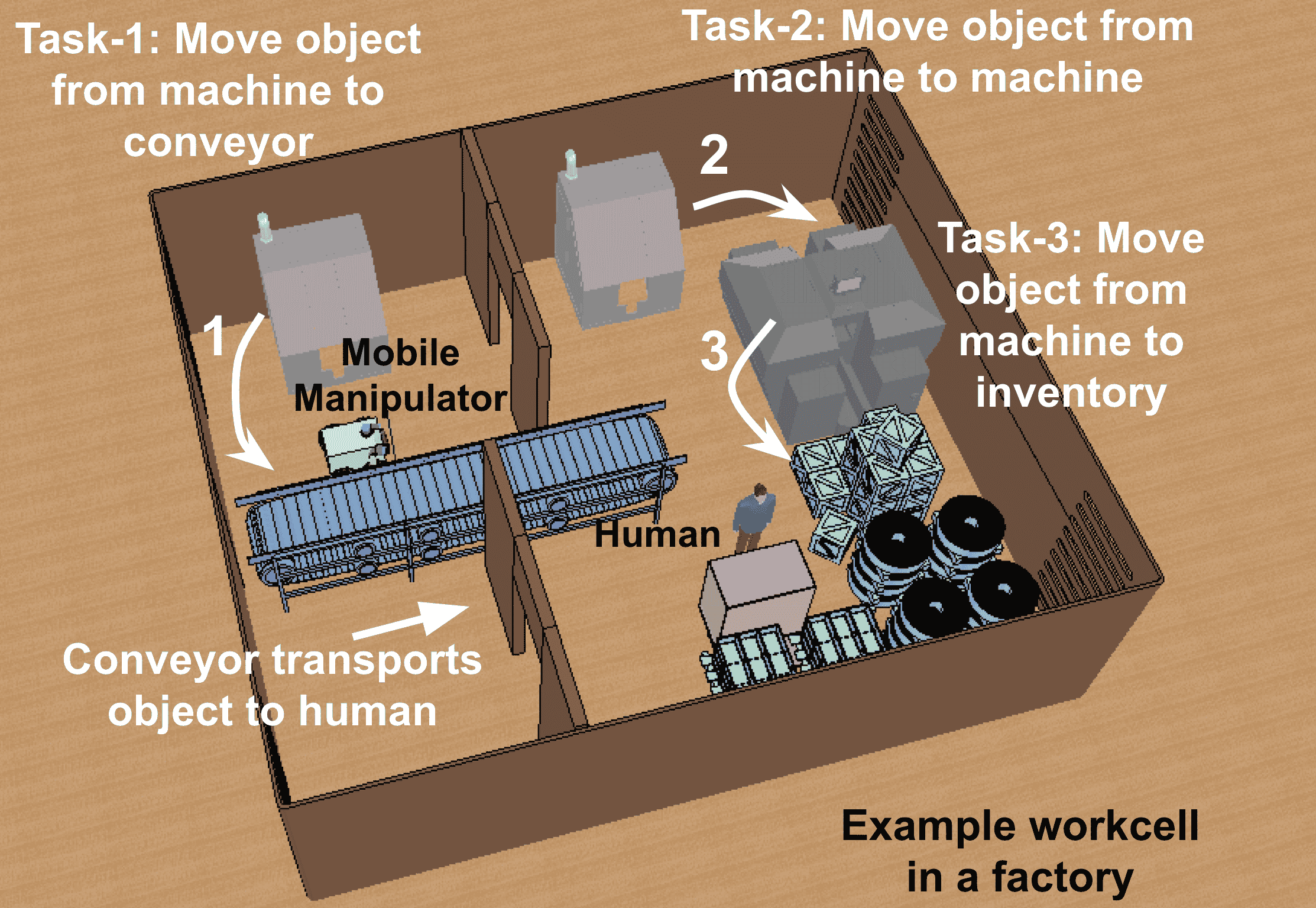
Proactive Contingency-Aware Task Allocation and Scheduling in Multi-Robot Multi-Human Cells via Hindsight Optimization
IEEE Transactions on Automation Science and Engineering
·
01 Jan 2025
·
doi:10.1109/TASE.2025.3546281
2024
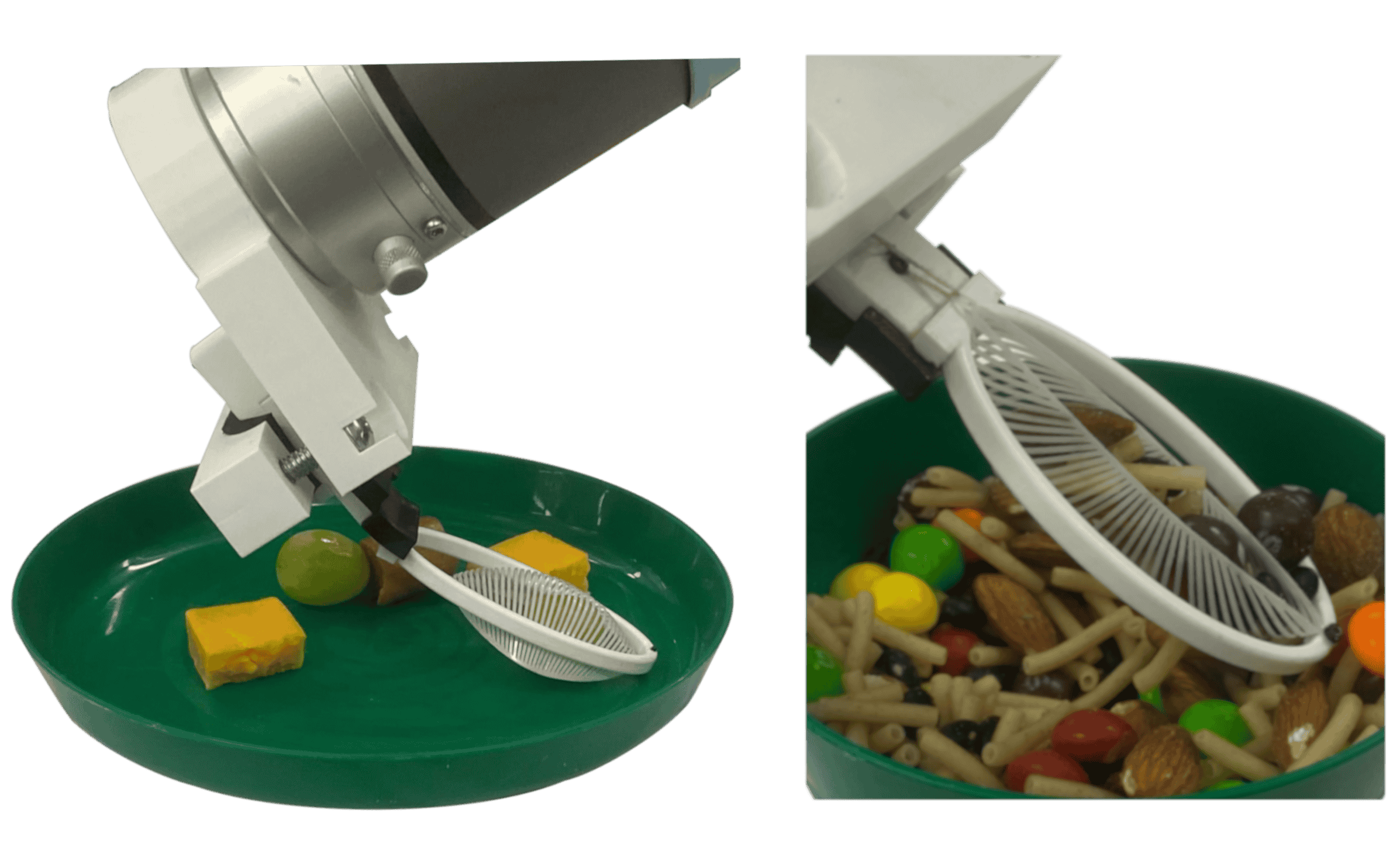
Kiri-Spoon: A Soft Shape-Changing Utensil for Robot-Assisted Feeding
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
14 Oct 2024
·
doi:10.1109/iros58592.2024.10801346
Selecting Source Tasks for Transfer Learning of Human Preferences
IEEE Robotics and Automation Letters
·
01 Aug 2024
·
doi:10.1109/LRA.2024.3415432
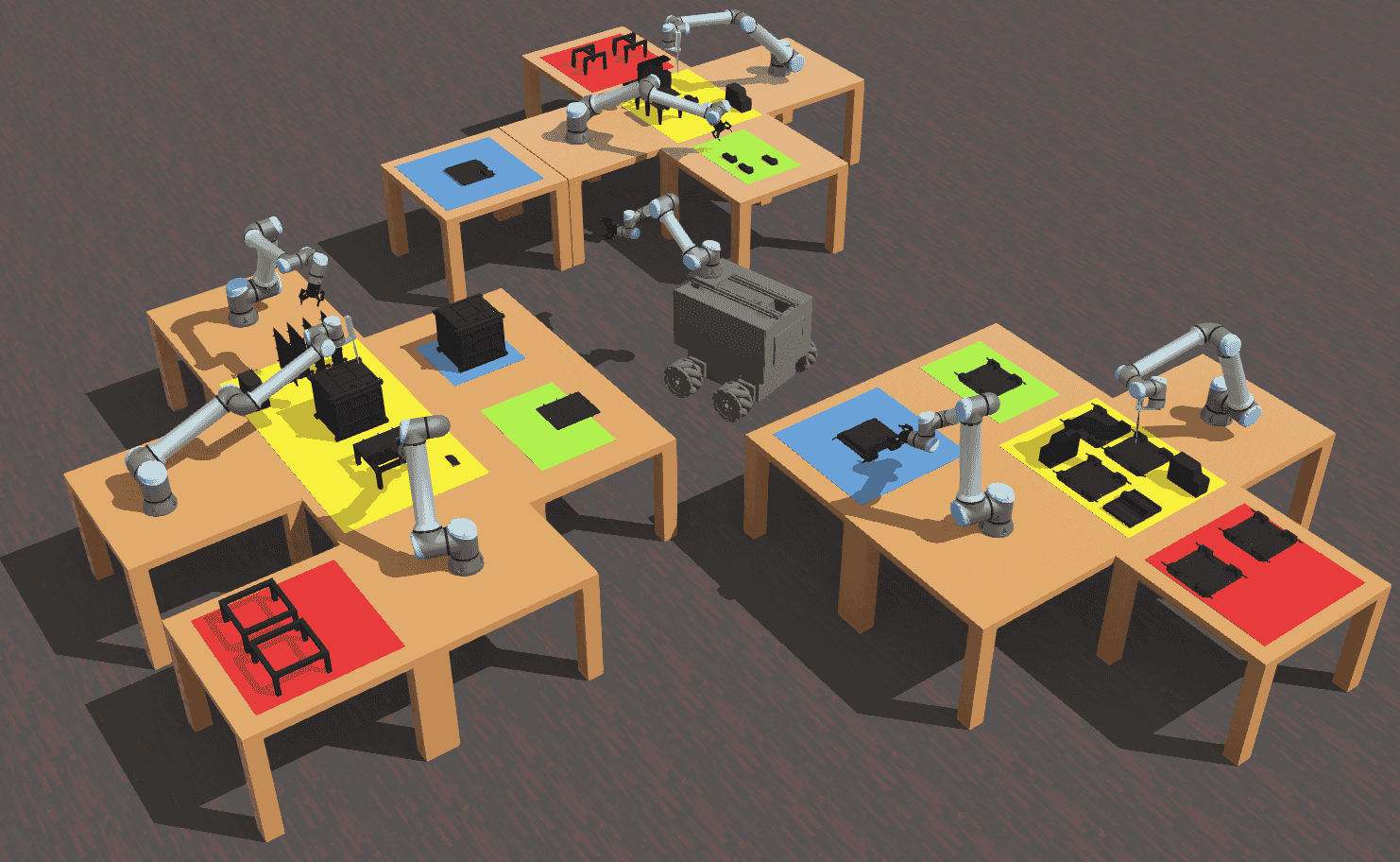
Multi-Robot Task Allocation Under Uncertainty Via Hindsight Optimization
2024 IEEE International Conference on Robotics and Automation (ICRA)
·
13 May 2024
·
doi:10.1109/icra57147.2024.10611370
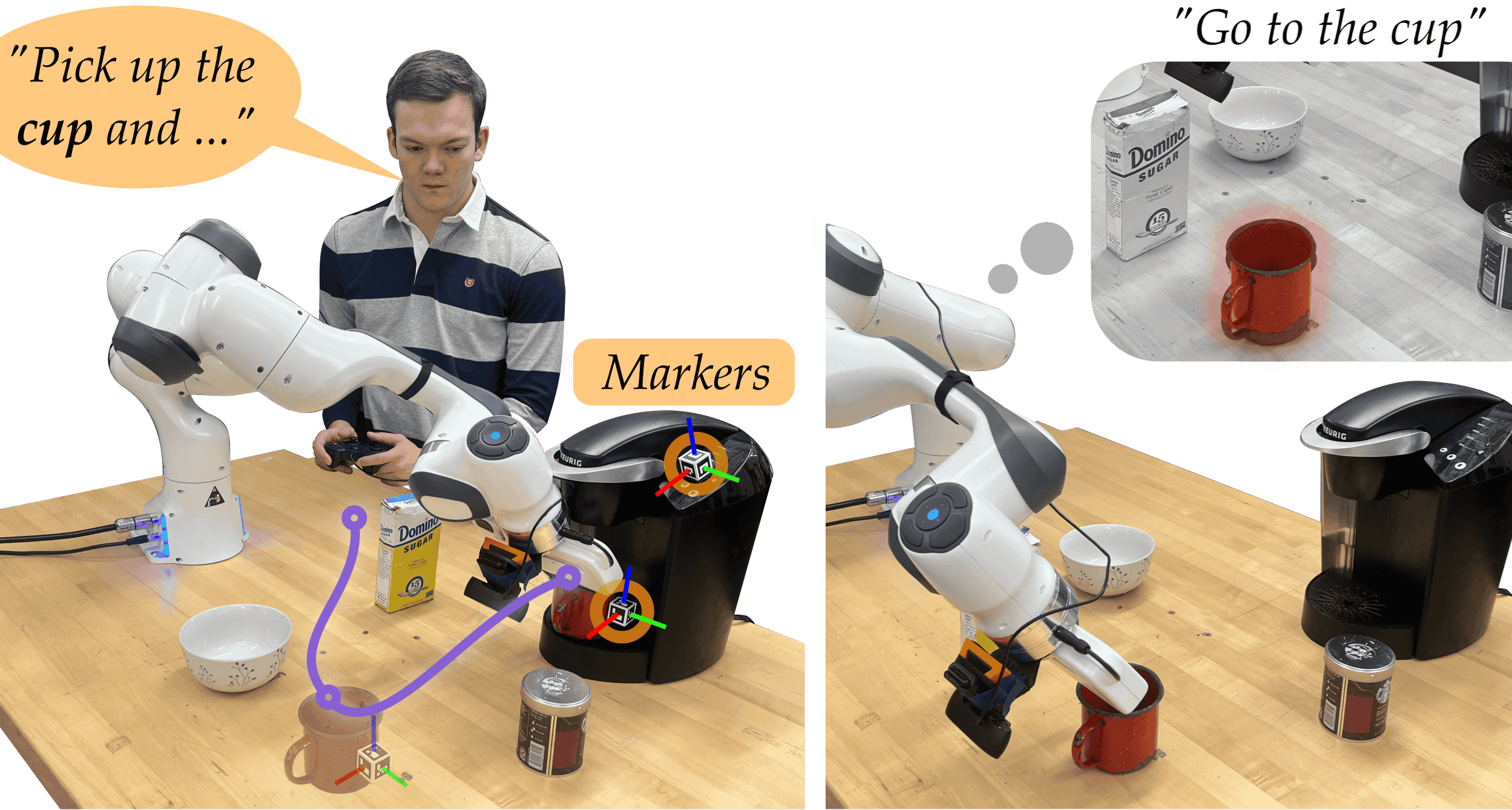
RECON: Reducing Causal Confusion with Human-Placed Markers
arXiv
·
01 Jan 2024
·
doi:10.48550/arXiv.2409.13607
2023
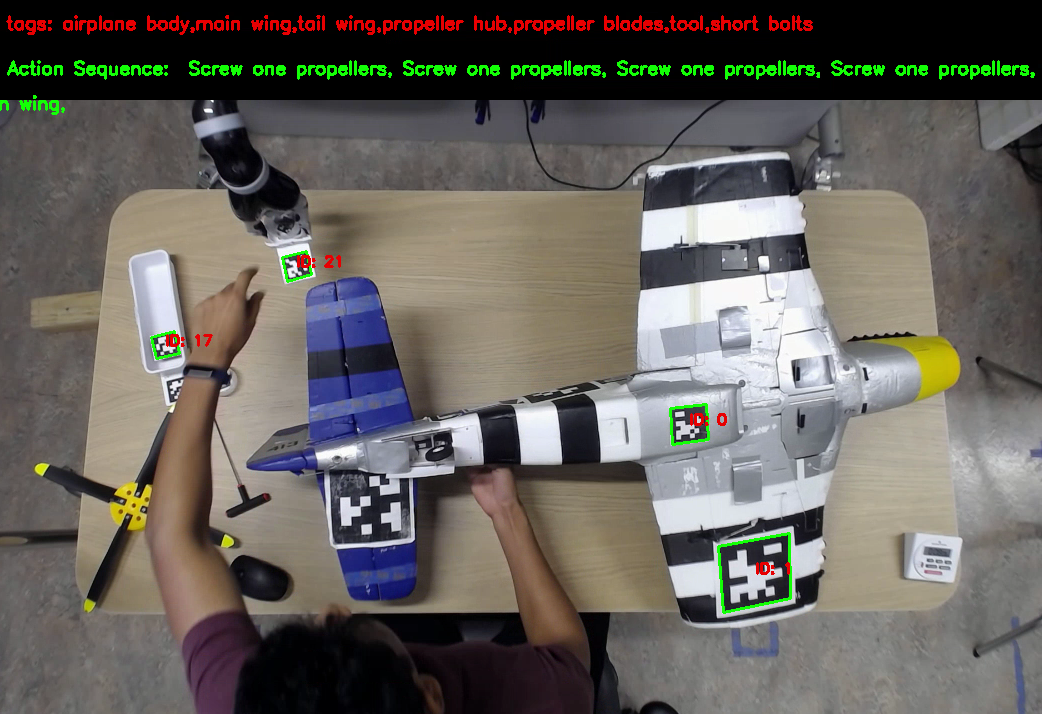
Transfer Learning of Human Preferences for Proactive Robot Assistance in Assembly Tasks
Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction
·
13 Mar 2023
·
doi:10.1145/3568162.3576965
Surrogate Assisted Generation of Human-Robot Interaction Scenarios
arXiv
·
01 Jan 2023
·
doi:10.48550/arXiv.2304.13787
2022
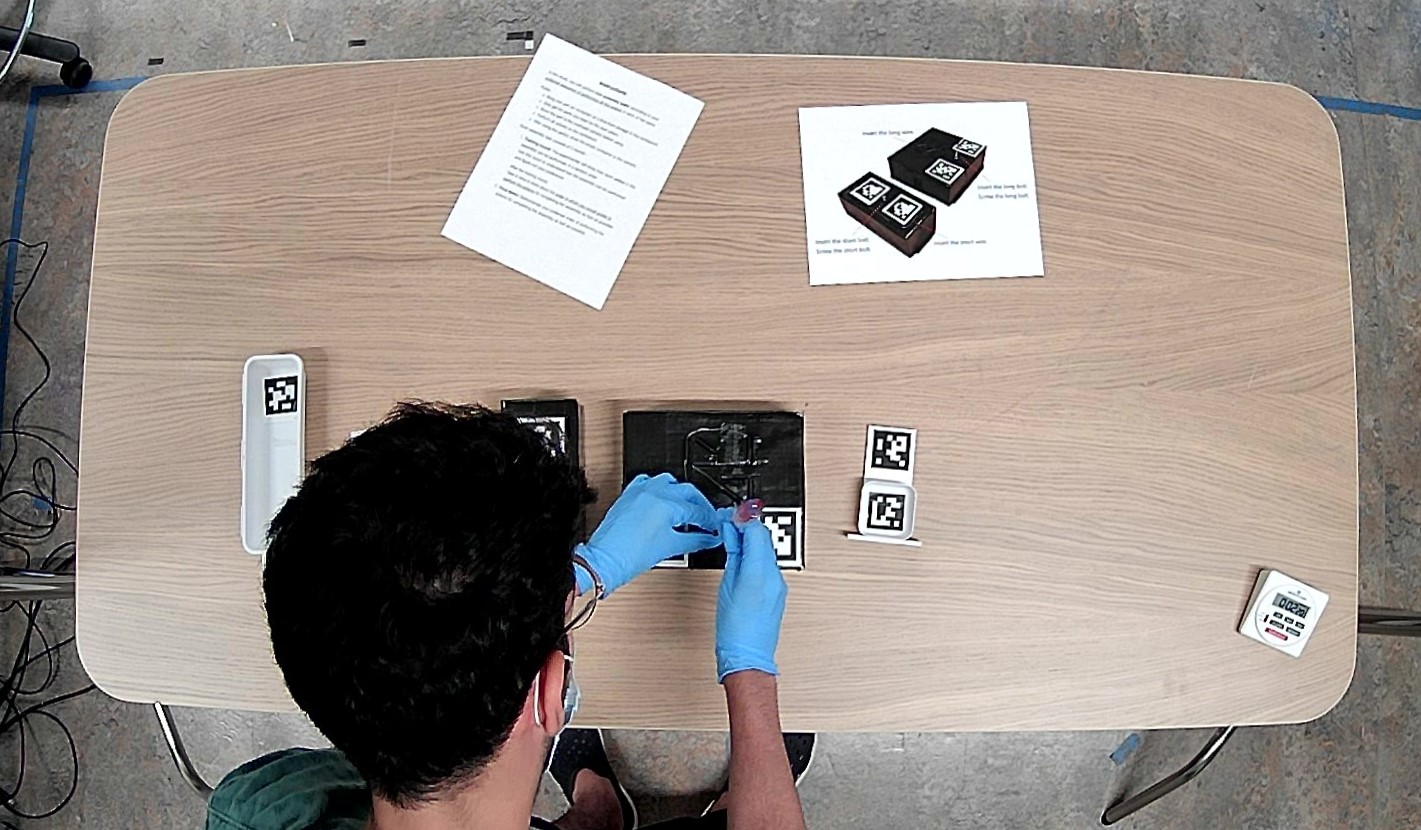
Towards Transferring Human Preferences from Canonical to Actual Assembly Tasks
2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
·
29 Aug 2022
·
doi:10.1109/ro-man53752.2022.9900872
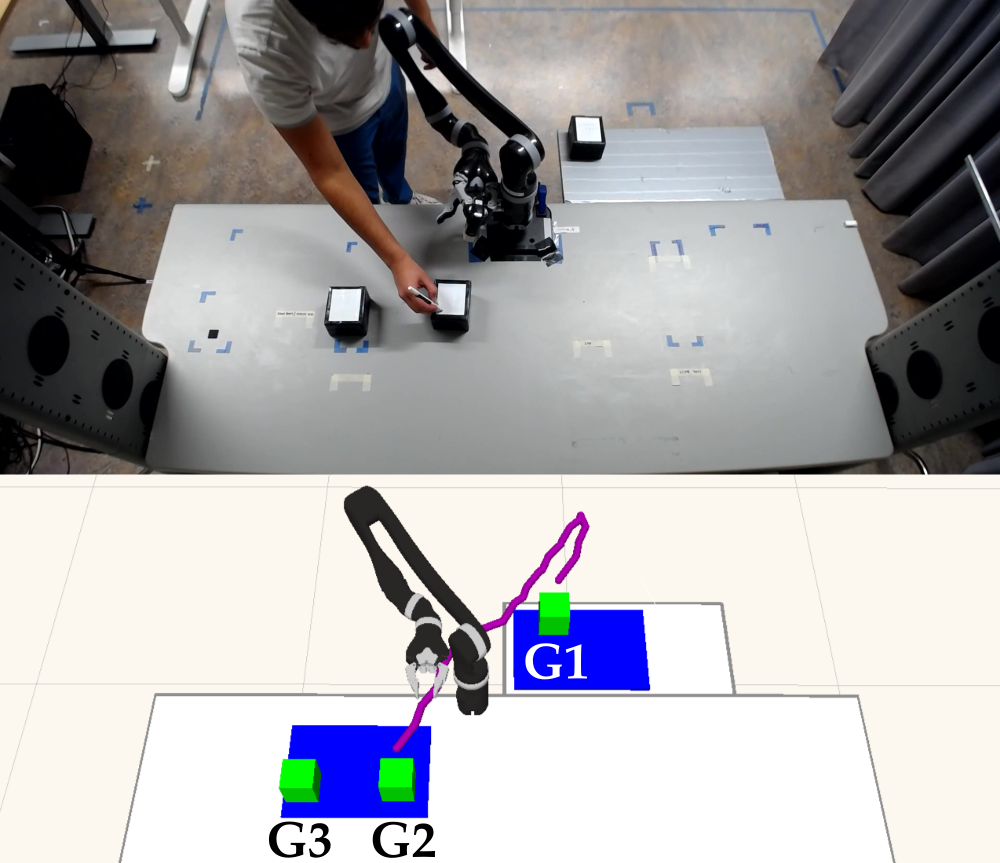
Human-Guided Goal Assignment to Effectively Manage Workload for a Smart Robotic Assistant
2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
·
29 Aug 2022
·
doi:10.1109/ro-man53752.2022.9900551
2021

Robotic Lime Picking by Considering Leaves as Permeable Obstacles
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
27 Sep 2021
·
doi:10.1109/iros51168.2021.9636396

Two-Stage Clustering of Human Preferences for Action Prediction in Assembly Tasks
2021 IEEE International Conference on Robotics and Automation (ICRA)
·
30 May 2021
·
doi:10.1109/icra48506.2021.9561649
2020
Fair Contextual Multi-Armed Bandits: Theory and Experiments
Conference on Uncertainty in Artificial Intelligence
·
27 Aug 2020
·
[no id info]
2019

Object Transfer Point Estimation for Fluent Human-Robot Handovers
2019 International Conference on Robotics and Automation (ICRA)
·
01 May 2019
·
doi:10.1109/icra.2019.8794008
Web of Science
[no publisher info]
·
[no date info]
·
wosuid:WOS:000723388600019
Web of Science
[no publisher info]
·
[no date info]
·
wosuid:WOS:001221201500024